In this lab, 3 types of motor systems were used: DC, Servos, and Steppers. Two systems were all very similar in that they used an H-bridge to control the motor. The servo motor was simpler as it only used the built-in Arduino library
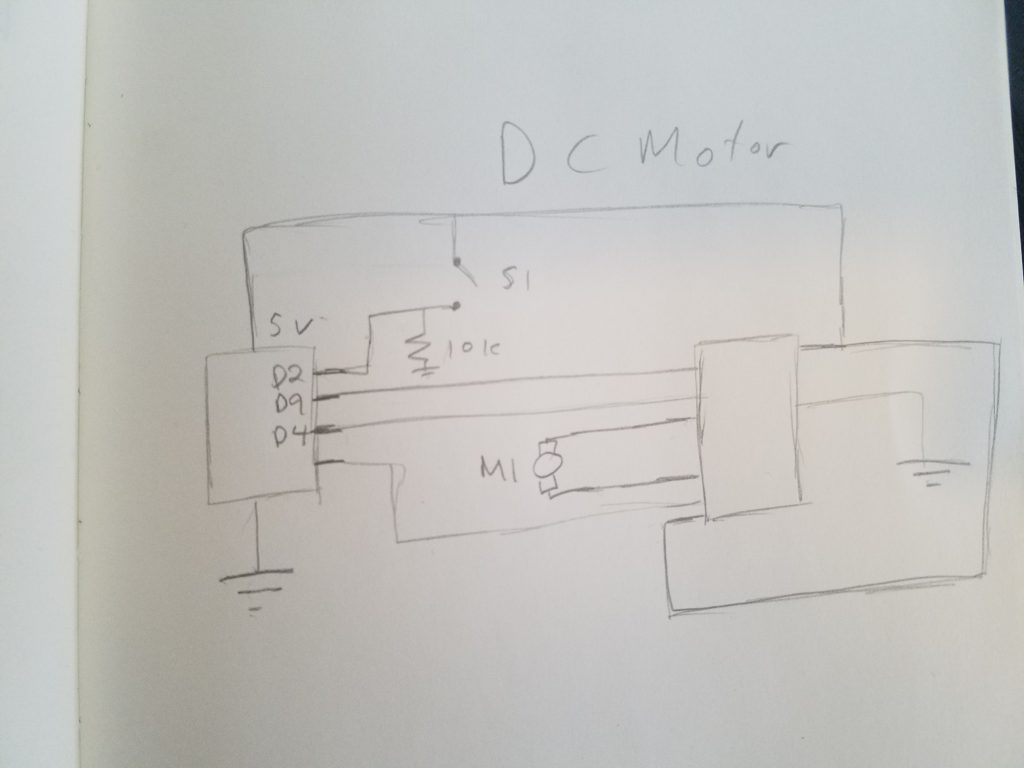
DC Motor
DC motors have a single speed and can only change direction when the polarity is reversed. In order to change the direction of the motor the H-bridge’s pins were manually coded.
Servo Motor
Servo motors can only rotate 180 degrees but have increased torque. In order to change the rotation, the output was mapped to a pressure sensor.
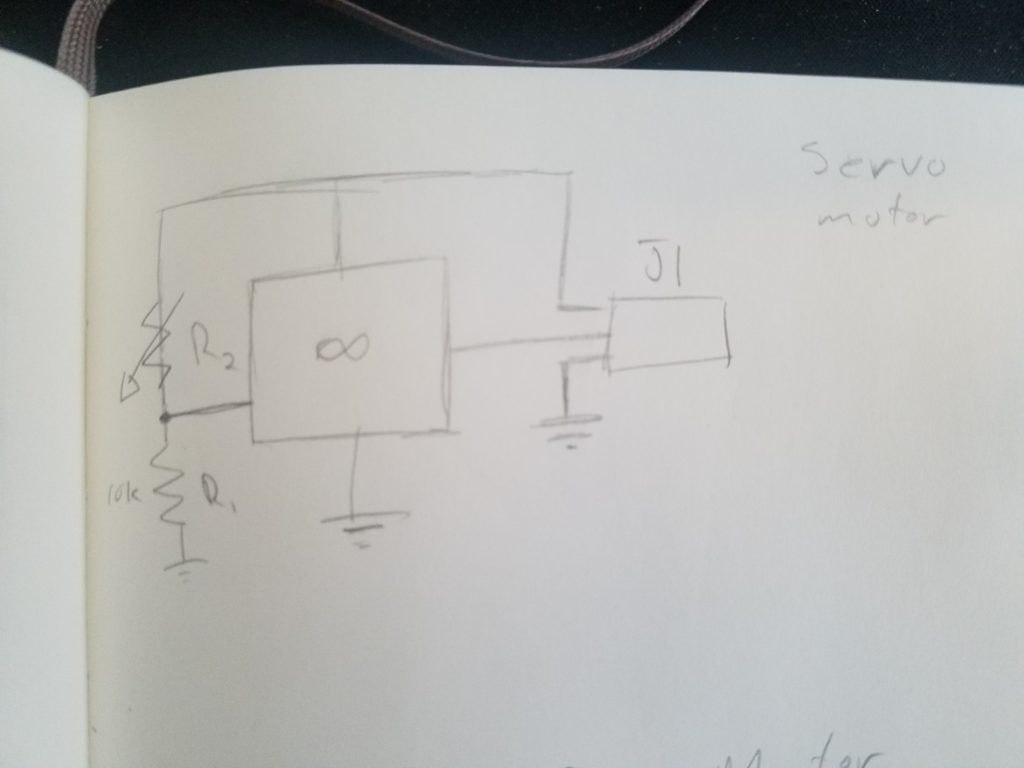
The coding for this is very simple as the Servo will accept a single value to change the rotation.
Stepper Motor
Stepper motors, while more complex then DC or Servo motors, they have the capability of increased torque and a full cyclic range or motion. The schematic for this was a lot more complex as every pin on the H-bridge was used
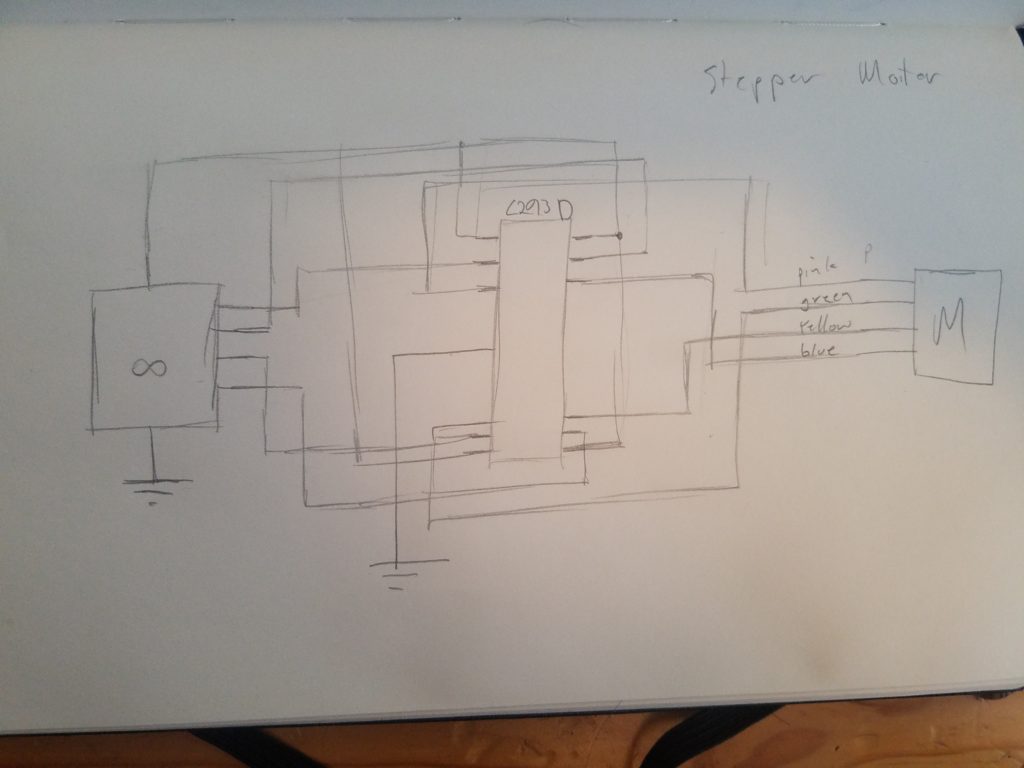
Because of Arduino’s built-in libraries and example codes, coding the stepper was very easy. I did have trouble getting it to work as the number of steps in a revolution has to be changed based on the stepper. Additionally, the RPM had to be lowered to the point that the motor will not burn out.